搜索产品搜索文章
专业保障 个性定制 资料下载 问题解答
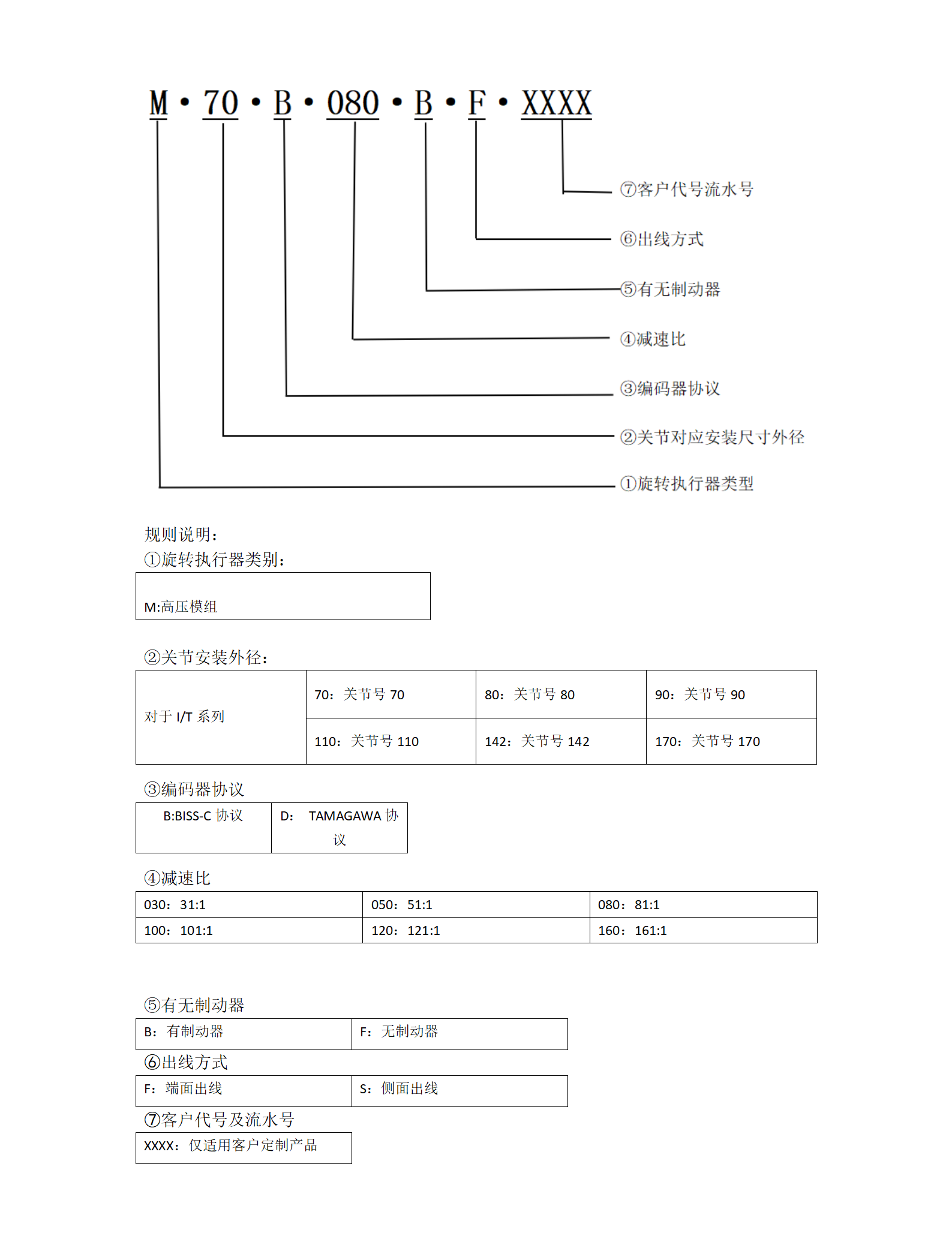
高压M系列模组命名规则
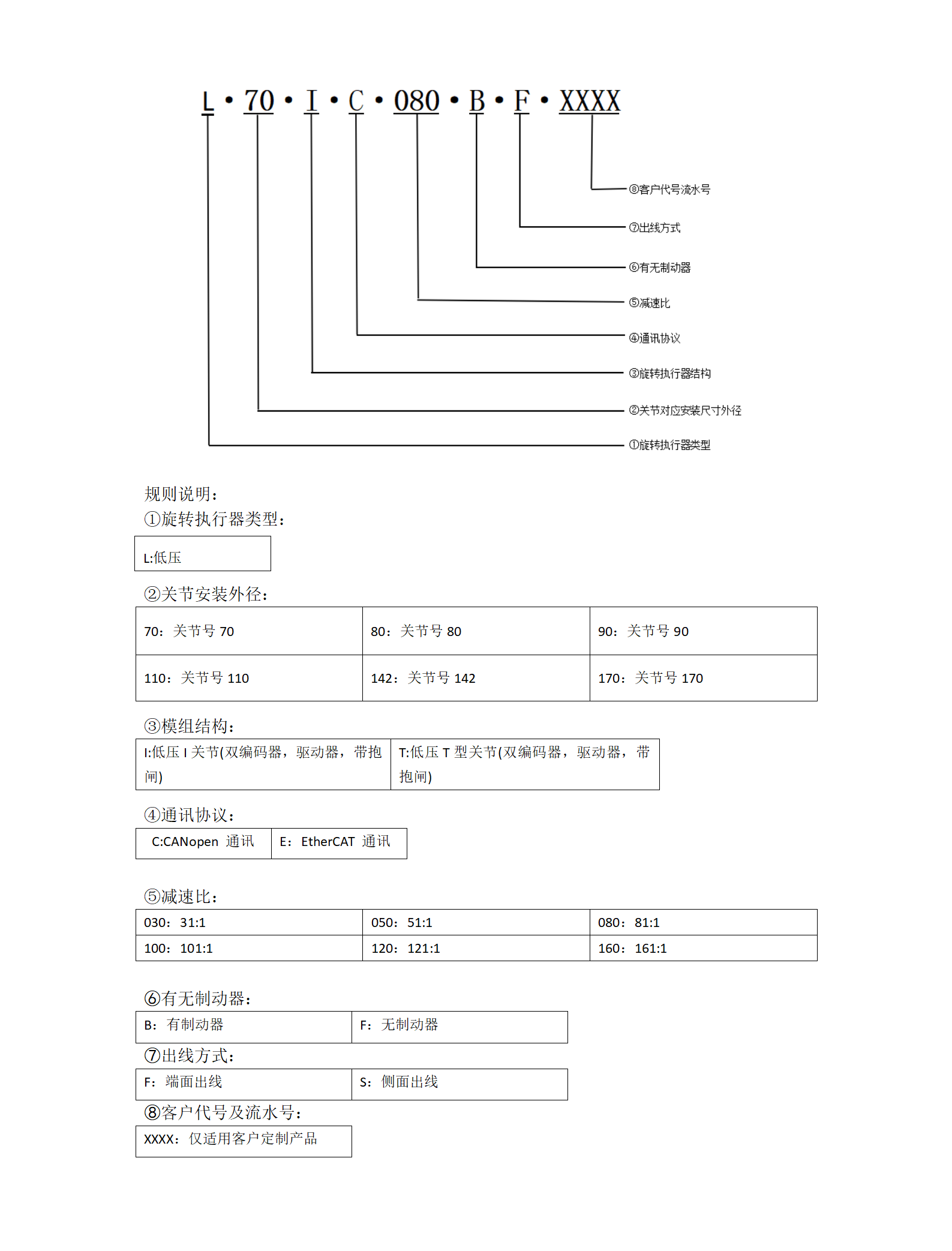
低压L系列模组命名规则
常见问题解答
A:
1、结构区别:多圈模组关节比单圈模组关节在配件上多一个3.6V的电池,在模组掉电后,给多圈编码器供电。
2、功能区别:多圈关节支持负载端反馈位置多圈计数功能;单圈关节仅支持在关节不断电时负载端反馈位置多圈计数功能。
3、位置反馈:多圈关节断电前后位置反馈一致;在关节掉电后多圈功能失效,丢失多圈数值。
A:
1、U、V、W 接线错误:检查电机 UVW 接线,需按相序接好(棕 U、黑 V、蓝 W)。
2、电机长期工作于过载情况导致电机内部烧坏:测量电机的 UVW 相间电阻是否均衡,如果相间阻值不平衡,更换电机。
3、电机内部存在相间短路或者匝间短路,电机缺相导致电机过流:确认电机三相对地是否出现短路,连接线路是否良好,若有问题更换电机。
4、电机电源电压不稳,电压突然过高导致电机过流:更换平稳的供电电源。
A:
1、请不要超出容许转矩。
①施加转矩请不要超出最大转矩。
②机械臂等直接附着到输出轴时,碰撞机械臂会导致输出轴不能控制。
2、请不要直接插到插座上。
①如果不连接专用驱动器,执行元件不能运转。
②请坚决避免直接将其连接到商用电源否则,执行元件会损坏,导致火灾。
3、请不要敲打执行元件。
①执行元件直接连接编码器,请不要用木槌等敲打。
②编码器损坏会导致执行元件失控。
4、请不要用力拉扯导线。
①用力拉扯导线会导致连接部损坏,执行元件失控。
5、通电状态下,请勿更改配线。
①配线拆装、连接器插拔等操作,请务必先切断电源再行实施。否则,会有触电及 失控的危险。
6、电源断开后5分钟以内,请不要触碰端子部。
①切断电源后内部带电。为防止触电,请在电源断开5分钟后再行实施检查作业。
②安装时,请采取相应措施确保不会轻易触碰到内部的电气元件。
7、请勿实施耐电压试验。
①请勿实施绝缘电阻测试及耐压试验。否则会破坏驱动器的控制电路。
②用于以上试验时,请向本公司咨询。
8、不能利用电源的ON/OFF操作来执行运转。
①频繁接通/断开电源会导致内部电路元件老化。
②请利用指令信号来执行元件的运转/停止操作。
A:
科迈德机器人关节模组是完全自主研发设计、是具备高转矩、提供精密旋转动作的伺服旋转模组。
其性价比高,性能卓越,稳定性好;整体结构设计紧凑,轻盈灵巧,满足更多的适用场景。
A:
科迈德机器人关节模组定位精度可达60角秒,重复定位精度可达20角秒。
A:
科迈德机器人关节模组运行噪音实测为60分贝。
A:
为了防止电压/电流超限,损伤电机,编码器等部件,起到保护模组的作用。
A:
1、电网电压过高:检查电网波动情况,220V驱动器正常电压范围200V~240V
2、负载转动惯量过大(再生能力不足):减小负载惯量,降低启停频率
3、制动电阻损坏或阻值过大:检查再生电阻,更换阻值合适的外置电阻
4、加减速时间过短:延长加减速时间
5、驱动器故障:更换驱动器
A:
1、模组长时间过载使用,建议选择更大规格的模组
2、模组故障:电机磁钢脱落后摩擦生热;电机绕组损坏导致电机过热;更换模组
3、减速机运行有异常;更换模组
A:
可以。科迈德机器人拥有成熟的解决方案团队和经验,接受客户对关节模组在功率、扭矩、减速比、尺寸等不同方面上的定制要求, 为其提供高效专业的定制解决方案。
 科迈德机器人
科迈德机器人